Project Vahana: VTOL or helicopter? | Seek n' Geek II

Ultimately, the VTOL plane was chosen for it’s ability to fly longer distances with less battery weight which reduced overall direct operating costs. The VTOL plane efficiency is in part because the tilt rotors provide lift during the vertical take off and landing, but then the rotors tilt to provide direct thrust during flight, while lift is provided by the wings. This is overall more effective than a helicopter configuration.
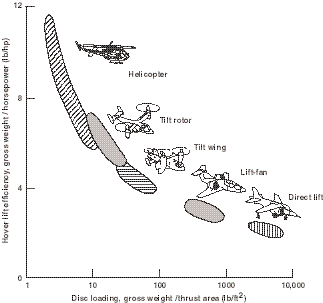
The Airbus Vahana VTOL is a tilt rotor configuration, which has low disk loading and high hover lift efficiency. Which might beg the question why not the helicopter option? For long distances the re-orientation of the tilt rotor provides more thrust and achieves lift from the wings that allows it to more efficiently fly for longer distances.
Project Vahana, named after the steeds of the Hindu gods, is Airbus’ futuristic project to build a self-flying electric robo-taxi. Fastco features the project in an article here. The article delineated an essential design choice between an electric helicopter versus a VTOL vertical take off and landing plane. Airbus definitely should have used FRDPARRC, but since they didn’t I made one for them. See chart below.
Hover lift efficiency and disk loading chart: Maisel, Martin D., Demo J. Giulianetti and Daniel C. Dugan. NASA SP-2000-4517, "The History of the XV-15 Tilt Rotor Research Aircraft: From Concept to Flight" (PDF), Public Domain, Wikipedia.
Project Vahana has actually posted a lot of their thinking and validation of the design choice in a trade study on their website in part I and part II and the Matlab code for the MDO (multidisciplinary design optimization) study on their github.
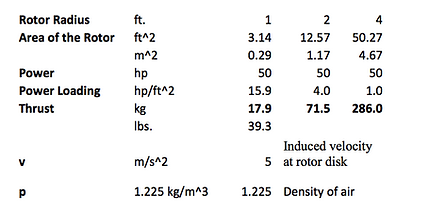
To check some of their numbers – especially the choice to use 8 rotors I ran some quick calculations for lift and thrust. I simplified the thrust equation as:
Lift and thrust simulations are quite complicated if you want to account for the airfoil shape, variable speed along the length of the rotor blade etc. A rotor is a type of airscrew with relatively low disk loading, where disk loading is the average pressure change across an actuator disk, or the ratio of propeller induced velocity and freestream velocity. (The Wikipedia page on disk loading goes into detail about the momentum theory and use of Bernoulli’s Principle.)
The thrust calculated above is only for a single rotor, multiplying the thrust for multiple rotors linearly gives a desired propeller radius close to 2 but definitely between 2 and 4 feet.
The propeller diameter is constrained by the functional requirement to minimize total footprint for accessibility in tight urban spaces.
Additional References


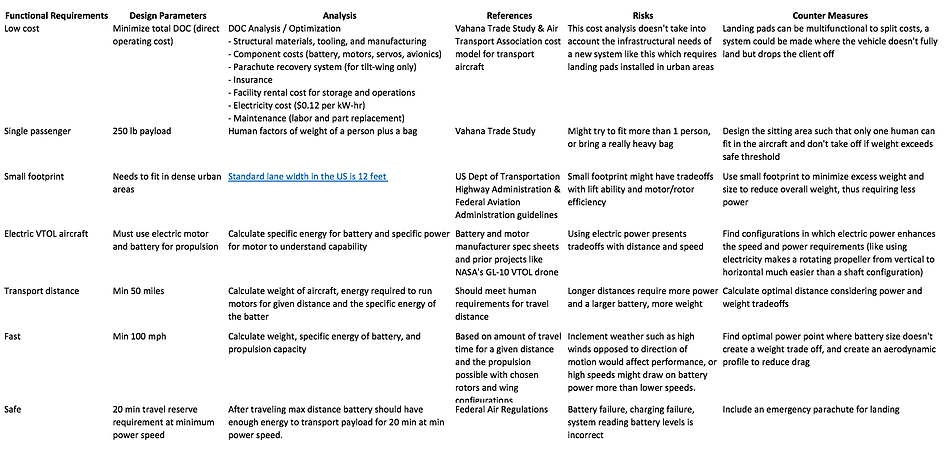
Vahana FRDPARRC